Tactile Pressure in Gripping/Lifting Objects
Introduction to Tactile Pressure
Tactile pressure sensors are used for a wide variety applications including, but not limited to the following:
- The optimization of ergonomic design when users interact with objects.
- Quantification of fingertip pressure in specific medical procedures.
- Measuring the distribution of foot pressure when designing footwear for comfort and good health.
- Measuring pressure to improve comfort of audio headphones or hearing protection devices.
- Measuring and visualizing pressure points to insure comfort in the design of chairs.
- Improvement of speed in catching and gripping a basketball to make a last second shot to win a game.
See, for example, the PressureProfile (PPS) website for details on the above listed applications.
PocketLab Voyager's tactile pressure sensor provides, among many things, an inexpensive way to investigate changes in fingertip force/pressure when gripping and lifting objects. Force is not measured in Newtons, but does allow comparison of applied force in arbitrary units ranging from 0 to 100.
Activity #1
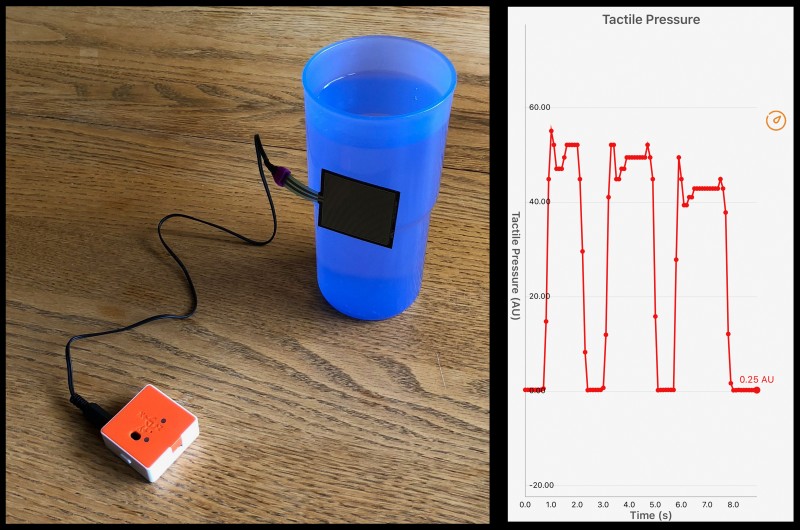
Use some removable double-stick tape to mount the tactile pressure sensor to the outside of a glass full of water, as shown in Figure 1. Lift the glass straight up about eight inches above the table top using your thumb and forefinger, with your forefinger on the tactile sensor. Hold the glass still momentarily, and then set it back down. Repeat this several times while recording the graph of tactile pressure in the PocketLab app. The default data rate of 10 points/sec works well. Most students will obtain graphs similar to that shown in Figure 1, in which the full glass was lifted three times. There will be some variance in pressure readings from one lift of the glass to the next lift of the glass.
The most interesting observation is the overshoot peak in tactile pressure as lifting begins. You are providing enough pressure to lift the object. But then your brain tells you that you can reduce the force just enough to keep if from slipping. This happens very fast and subconsciously. The horizontal line for each of the lifts is where you hold the glass still for a moment.
Activity #2
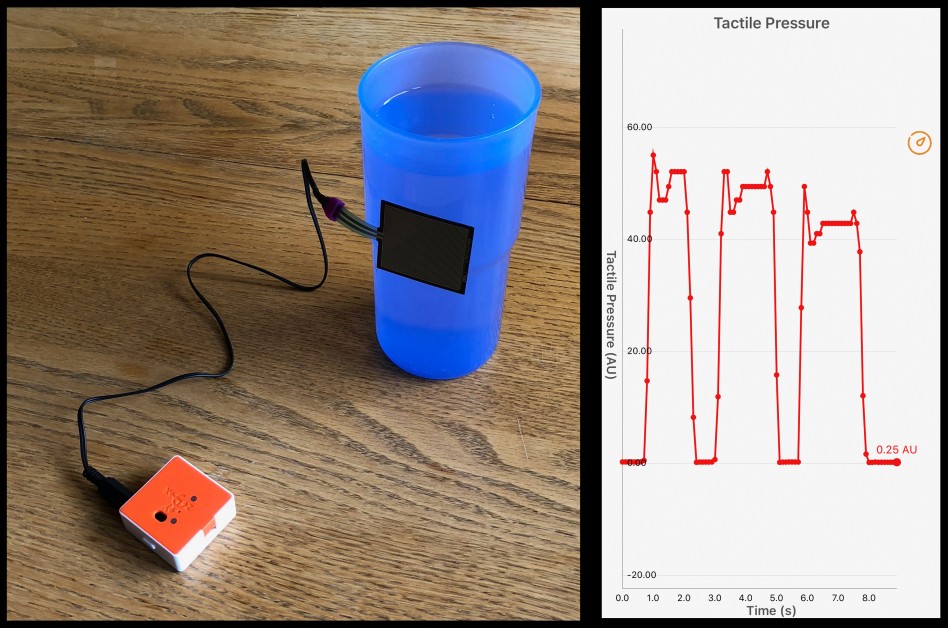
Repeat activity #1 using a glass half full of water. What similarities and differences do you see in the tactile pressure graph?
Figure 2 shows a similarity that the peak overshoots in pressure still exist. The major difference is that the overshoot pressure and pressure required to keep the glass momentarily still are significantly less. This pressure appears to be about half that of full glass of water in activity #1.
Activity #3
In this final activity, you will be lifting the glass and then lowering it some, repeating the lifting and lowering several times at a comfortable steady frequency. Then stop lifting and lowering, and just keep the glass steady while holding it still for a few seconds
Figure 3 shows a typical graph of tactile pressure versus time for this motion. The pressure goes up and down in sync with the frequency that the glass is moved up and down. Once again the brain subconsciously plays its part. It detects that the glass is beginning to slip, causing you to increase the gripping force in an effort to keep the glass from dropping. When you end the activity by holding the glass still, the pressure no longer shows periodic changes.
The activities in this lesson were motivated by a video at the PPS website.
Additional Voyager Tactile Pressure Sensor Activities
Links to three additional tactile pressure sensor investigations are: