Introduction
LIDAR—an acronym for Light Detection and Ranging—is a method for remote sensing to measure distances. While LIDAR commonly uses reflected laser light to accomplish this, students can investigate LIDAR principles by using Voyager’s IR rangefinder in conjunction with Ozobot Evo. Ozobot is a tiny programmable robot that can follow lines. In this activity, PocketLab Voyager is mounted on top of Ozobot. While Ozobot travels at a constant speed along a straight line path, Voyager records the distance to what it "sees" along one side of the path. The "terrain" is recorded as well as obstacles that are in view. This is very similar to the way in which hydrographic sonar systems are able to map the floors of lakes and oceans and discover sunken ships.
The LIDAR Activity Setup
This activity can be used at any grade level, but is particularly instructive and fun for junior high school students. Figure 1 shows the setup for this lab. The shape of the terrain (or ocean bottom) was created by propping up several books. Your students will likely come up with other unique ways to accomplish this. Narrow dowel rods serve as the obstacles, which can be imagined as representing the sunken ships. It seems to work best to have the obstacles be narrow and close to the path traveled by the Voyager-Ozobot team. A long piece of adding machine tape with a black line drawn on it provides a path for Ozobot to follow.
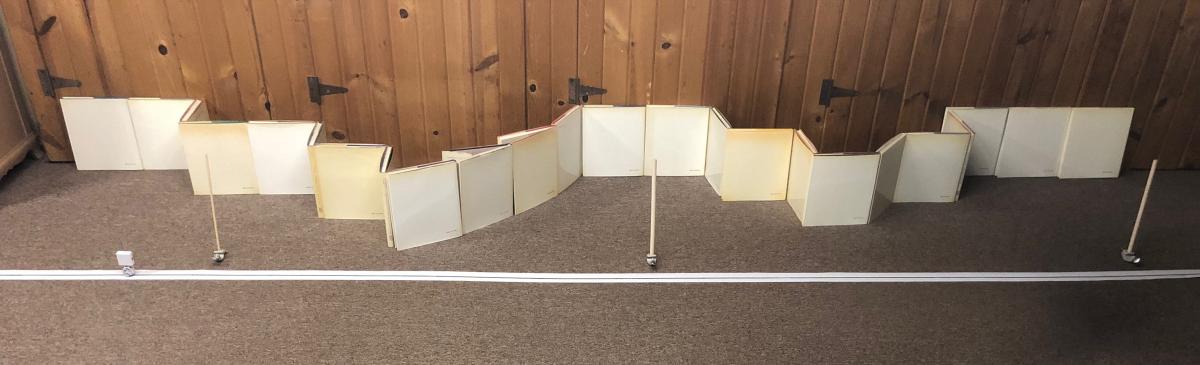
Figure 2 shows a closeup a portion of the setup centered on the leftmost obstacle. Voyager is mounted to the top of Ozobot with some modeling clay so that it is perpendicular to the direction of motion of Ozobot. Voyager's rangefinder faces the terrain. The dowel rod obstacles are help up by ring-stand clamps.

The OzoBlockly Program for Ozobot Evo
Figure 3 shows the OzoBlockly program that needs to be loaded into Ozobot Evo for this lab. Ozobot's top light will be red for three seconds prior to any movement by Ozobot. The line-following speed for Ozobot is set to the maximum allowable for Ozobot. When Ozobot reaches the end of the line drawn on the tape, it will shut down.
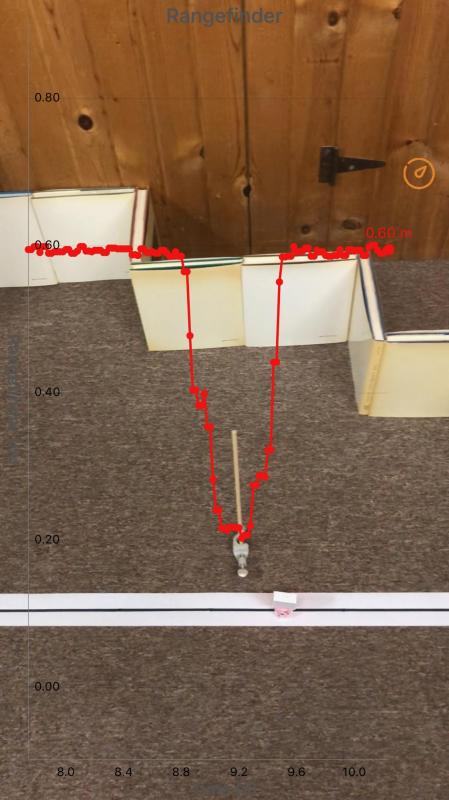
Here is a combined video showing IR rangefinder data collected by the PocketLab lab using the setup that has been described here:
Another LIDAR Activity with Voyager and ScratchX
For anyone who may be interested, here is a link to an alternate LIDAR lab that makes use of Voyager and ScratchX: