Introduction to Accelerometers
What does an accelerometer measure? The obvious answer is acceleration, but that's not really true. An accelerometer actually measures normal force or restoring force which we equate to acceleration using the formula, F=ma. This article will explain the fundamental operating principles of accelerometers and answer the question: how does an accelerometer work? We will also investigate the capabilities and drawbacks of accelerometers in certain applications.
You can investigate these concepts on your own using:
- The PocketLab Voyager, which contains a 3-axis MEMS accelerometer as part of a 9-axis inertial measurement unit (IMU)
- The PocketLab One, which contains a stand alone 3-axis MEMS accelerometer alongside but not integrated with a gyroscope and magnetometer
- The accelerometer internal to your smart phone using programs like Science Journal or PhyPhox
- The PASCO Wireless Acceleration Sensor or the Vernier Go Direct Acceleration Sensor

Accelerometer Fundamentals
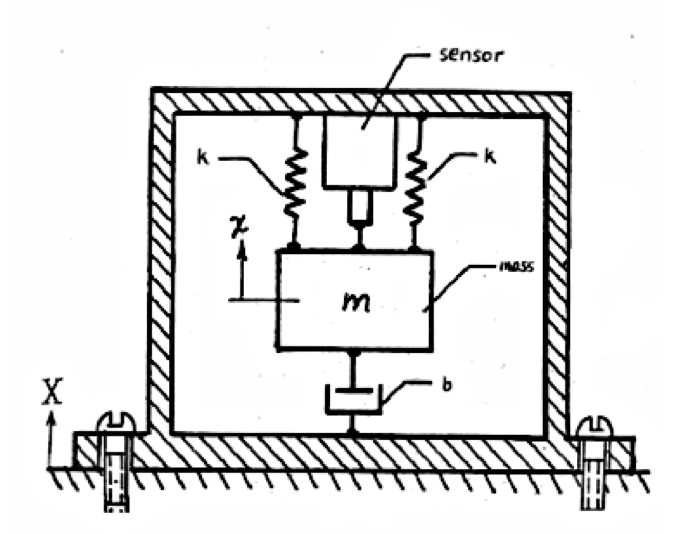
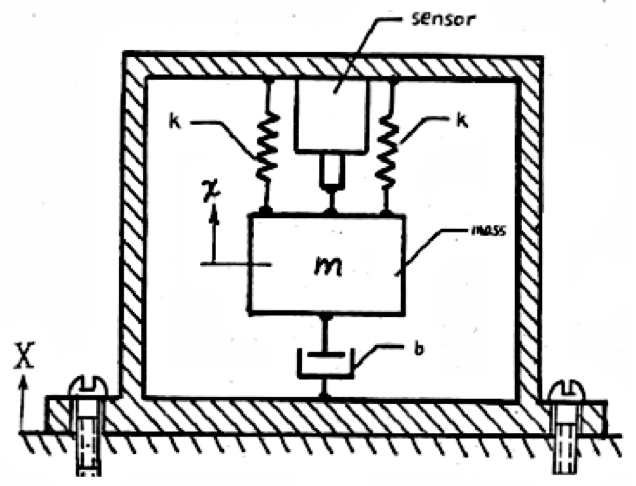
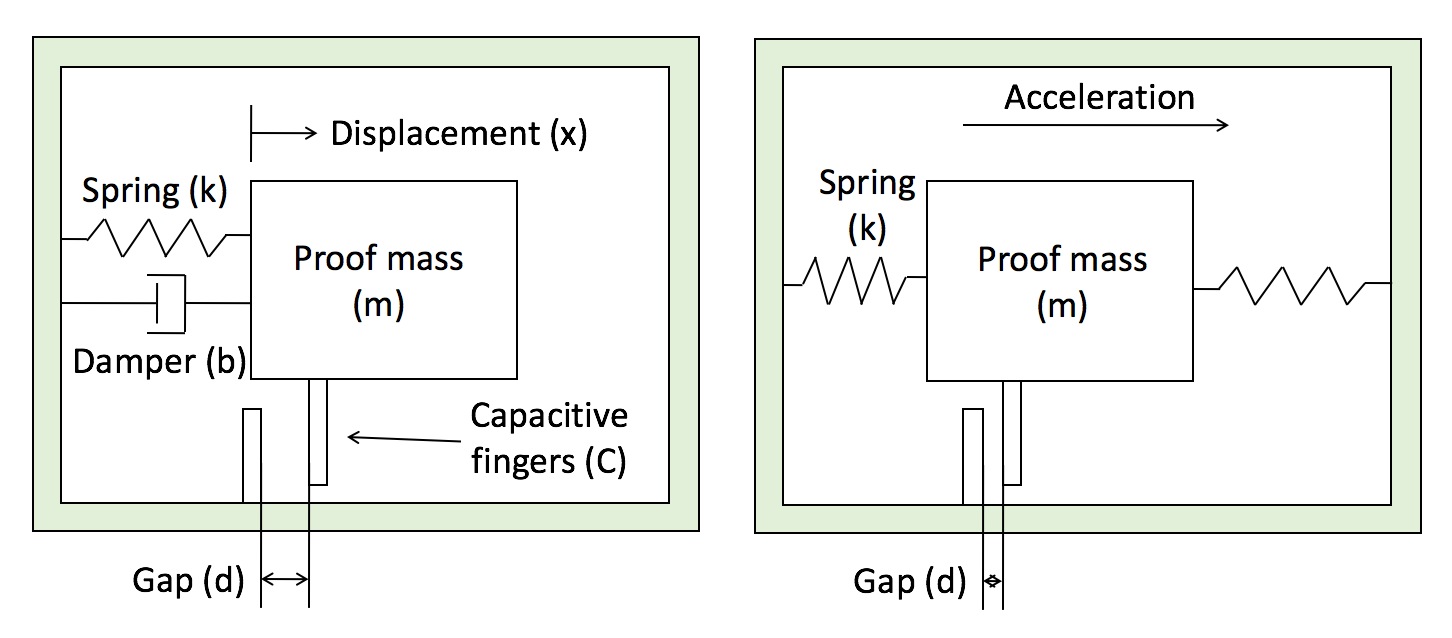
At the core all accelerometers contain five essential elements:
- A mass that is able to move around, called a proof mass
- A spring suspension to hold the proof mass
- Some damping either due to designed damper or due to air resistance
- A displacement sensor to measure the proof mass movement
- A frame to connect the accelerometer to the thing you want to measure
The basic principle of operation is that the as the frame of the accelerometer moves, the inertia of the proof mass wants to keep the proof mass stationary. The inertial forces on the proof mass are equalized by the tension in the springs attaching the proof mass to the frame, so that the proof mass doesn't just crash into the frame. A sensor measures the displacement between the proof mass and the frame which is calibrated and converted to a measurement of acceleration in units of gravities (g) or units of m/s2. One g unit = 9.81 m/s2.
What types of things are accelerometers good at measuring?
- Acceleration
- Vibrations
- Tilt angle relative to gravity
- Centripetal force and acceleration
- Collisions
- Fast movements
What types of things are accelerometers bad at measuring?
- Velocity
- Position
- Projectile motion
Accelerometer Noise and Error
Why if we can measure acceleration with an accelerometer, can't we accurately calculate velocity and position by doing an integration? We know acceleration is the derivative of velocity, which is the derivative of position. It makes sense that we should be able to integrate acceleration to calculate velocity, then integrate again to calculate position, right?
For a few reasons, errors in the accelerometer data will propagate and grow when integrated.
- An accelerometer cannot differentiate between the inertial forces due to movement and the force of gravity acting on the proof mass.
- Acceleration due to rotation cannot be separated from acceleration due to linear motion without extra sensor data from a gyroscope or magnetometer.
- Vibrations of the accelerometer will accumulate error and cause drift in any velocity or position calculations, a term called vibration rectification.
- Drift in the offset of an accelerometer measurement due to temperature changes or other sources of error will accumulate over time.
Here's a great lecture from InvenSense, the makers of many widely used accelerometer and IMU components, talking about the integration error that propagates over time: Youtube link.
The important parameter to measure in the accelerometer model in the figure above is the difference between the position of the frame, X, and the position of the proof mass, x, which we define as variable Z, such that Z = X - x.
Summing the forces on the proof mass and rearranging the typical second order characteristic equation, we get the expression for Z being equal to the equation below:
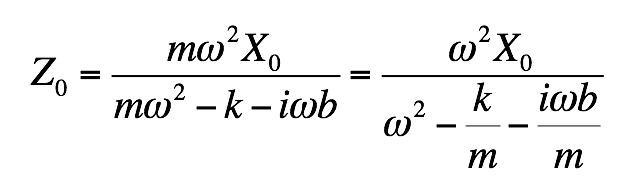
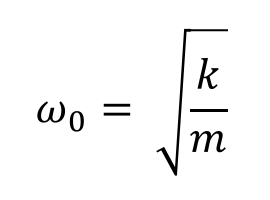
Where, m is the mass of the proof mass, w is the frequency of motion, k is the spring constant, b is the damping coefficient, and the i term shows that the solution is complex with possible imaginary terms. For a second order system we can calculate the natural frequency w0 as
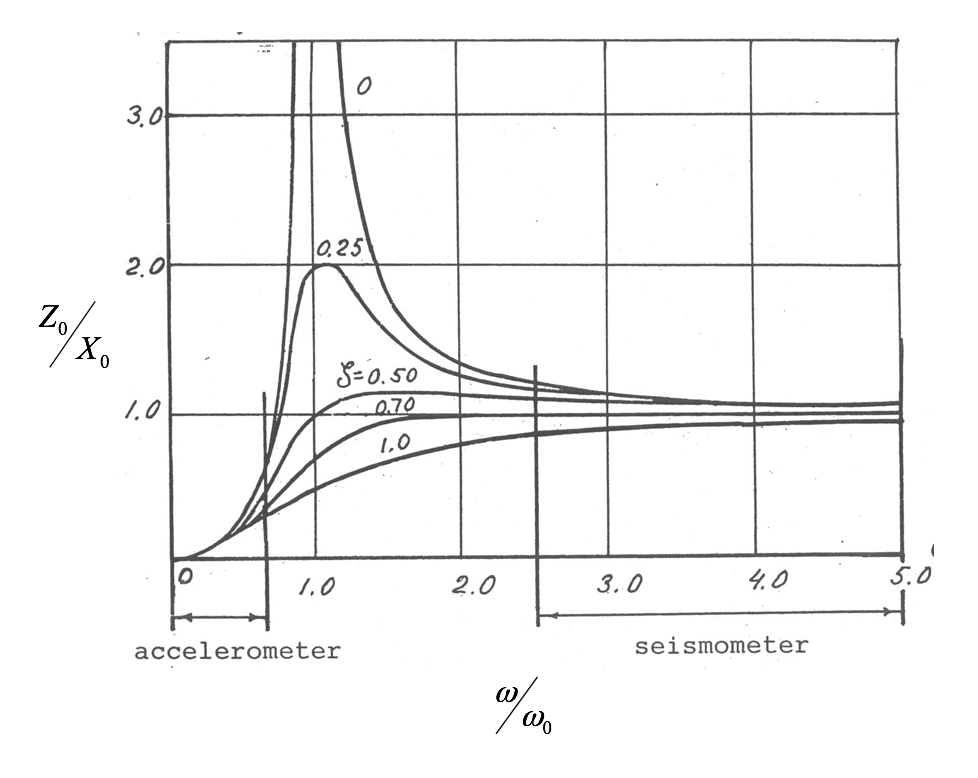
We can examine the transfer function for a few values of the terms to understand what happens to our system.
- For the cases where damping, b is 0 or close to 0, when the frequency w equals the natural frequency of the system, wo, the amplitude of Z will go to infinity.
- When the frequency of the acceleration signal is below the natural frequency, the displacement of the proof mass Z will be proportional to acceleration. This is the regime where an accelerometer operates.
- When the frequency of the acceleration signal is above the natural frequency, the displacement of proof mass Z will be proportional to the displacement X of the frame. This is the regime where a seismometer operates.
The plot below shows how the proof mass displacement, Z, changes vs. frequency for various amounts of damping.
In order to measure the displacement of the proof mass, most modern accelerometers use a capacitance measurement method. The proof mass will have a movable capacitor plate and the frame of the accelerometer will have a stationary capacitor plate. As the proof mass moves, the gap between the capacitor plates changes which changes the capacitance. Special electronic circuitry converts the change in capacitance to a change in voltage which then can easily be read by other digital electronics.
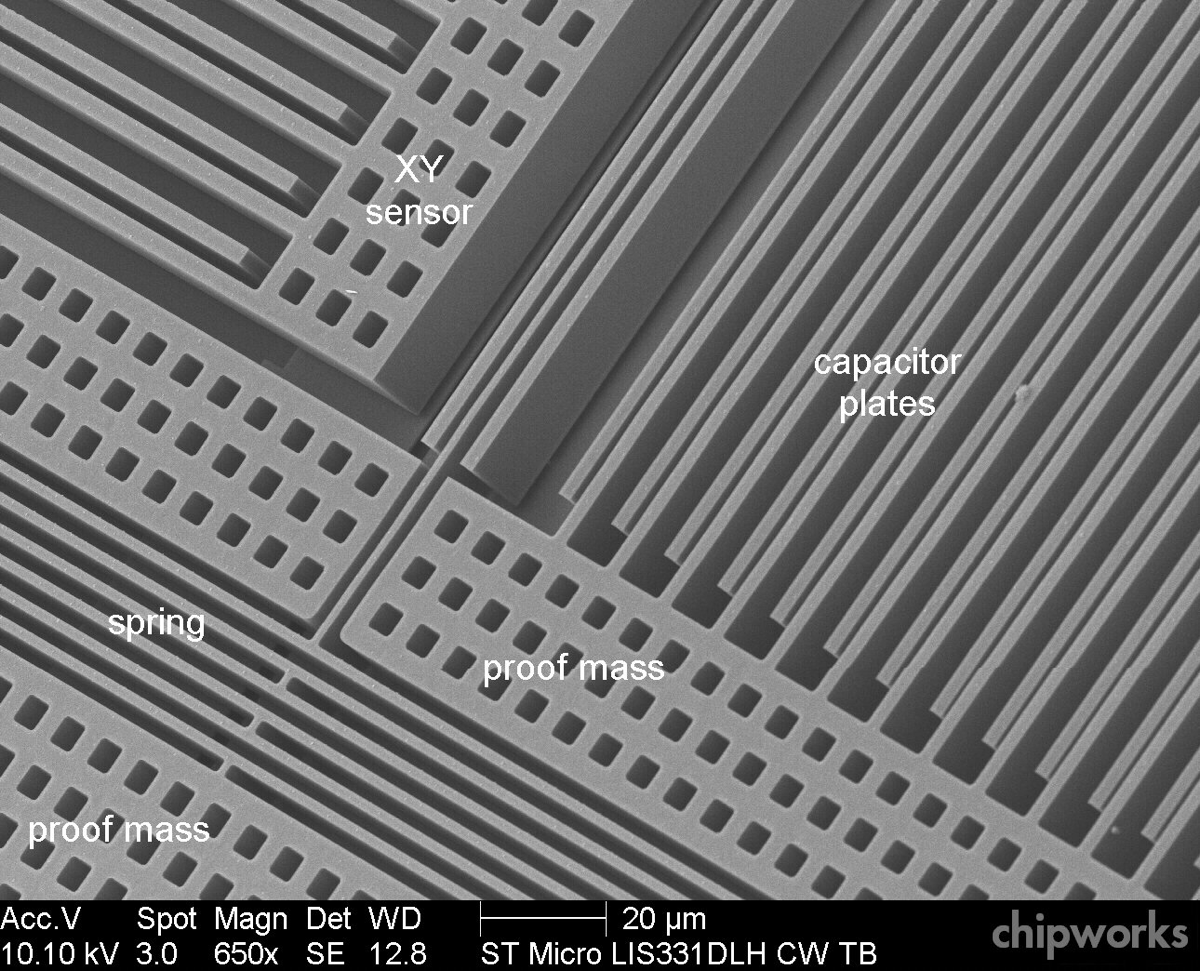
Modern accelerometer designs have many rows of the capacitor plates that function in parallel to increase the amount of capacitance change per unit of displacement of the proof mass. The scanning electron microscope image shows the proof mass and capacitive plates of an ST Micro accelerometer that is commonly used in smart phones and wearable devices.
Science Activities using Accelerometers
- Investigate the collision of a car against a road barrier
- Measure the forces that cause concussions and head injuries
- Learn about the physics of a croquet mallet
For more information about accelerometers check out the presentation attached as a .pdf file to this article.